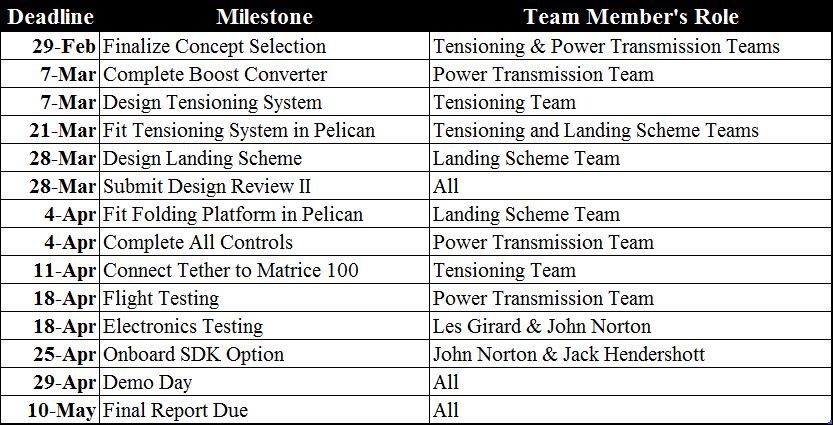
Milestones to Accomplish
Problem Analysis of Tensioning SystemThe main challenge currently associated with the tensioning system is strain gauge calibration. After determining the ideal tether tension, we need to determine the corresponding voltage output from the strain gauge. Given our goal to control the motor based upon this voltage output, large fluctuations in measurement based upon wind conditions or GPS inaccuracy will need to be considered.
Improper tensioning could also cause entanglement, leaving the quadcopter in danger of crashing. Because of this entanglement danger, we will need to ensure that a sudden and unexpected high tension scenario would lead to immediate tension release. This will be done by having the motor release large amounts of tether if the tension increases above a certain threshold value. |
Power Transmission HurdlesThe most difficult part about power transmission was the design of the boost and buck converter circuits. This is a unique design case that requires both high voltage and high current, meaning many off-the-shelf converters were not suitable for this project’s needs. The lack of commercial technology necessitated that we design and build our own converters, a time-consuming and energy-intensive process for engineers who specialize in mechanical rather than electrical systems. Now that the circuits have been designed, our most pressing concern is safely implementing them, especially given the high power levels we are dealing with. If we believe these circuits are unsafe after development, we may be forced to change our design to allow for AC power transmission. However, with AC power transmission, a DC Power Supply would need to be placed on the quadcopter during operation.
|
Base System EvolutionThe base system was formally known as the landing system. This system has undergone several iterations to take into account the landing of the Matrice 100, housing of all electrical and mechanical units, and the required space needed for the Matrice 100 to land while being reeled in through the tensioning system. The first design involved a platform that would fold out of a pelican case. However, this was deemed unfeasible as the platform would need to large enough to account for the GPS' accuracy of 1 meter. The second design removed the fold-able platform, and instead had the Matrice 100 land directly on top of the Pelican case. Because of the tensioning system, it was thought the 1 meter accuracy would not be an issue. The final design is ultimately the most simple - having the Matrice 100 land on the ground beside the tool box, which is the newest base system design. |
